Сегодня заказать электронику для квадрокоптера из китая стоит очень дешево. Собрать раму квадрокоптера своими руками из подручных материалов и вовсе не сложно. Научиться управлять можно с помощью авиасимуляторов. Так что главное – это наличие желания сделать квадрокоптер своими руками.
Электронику для квадрокоптера лучше всего купить готовую.
Сборка радиоуправляемого квадрокоптера своими руками
Для начала надо определиться – будете использовать стандартную раму или решите изготовить свою.
Покупная рама удобна, но в случае поломки придется ждать, пока приедет запасная деталь. Самодельная рама квадрокоптера собранная своими руками позволяет починить поломку за 20-30 минут, но требует дополнительной работы при изготовлении квадрокоптера.
Наиболее простым вариантом является использование пластиковых труб для проводки проводов. Они легкие и достаточно прочные. К тому же можно купить и поворотные части и крепления к стене, которые подходят для крепления электродвигателей к раме.
В результате получается очень прочная конструкция которая позволяет возить не только электронику самого квадрокоптера, но и камеру для видеосъемки с квадрокоптера.

Немаловажная деталь для начинающих — место, где вы будете выпускать для полётов свой первый дрон. Городская местность отпадает сразу, так как дома, деревья и провода будут мешать пробным полётам. Парк так же не подходит. Одно неправильное движение — пострадать может отдыхающий и ваше новоиспечённое детище. Лучше выйти в чистое поле и рулить квадриком в своё удовольствие.
Список основных запчастей:
O моторы с контроллерами для них;
O аккумулятор для квадрокоптера и пульта управления;
O полётный контроллер;
O пульт управления с приёмом и передачей сигнала;
O зарядное устройство;
O соединительные провода, болтики и прочее;
O инструменты для работы.

Для того, чтобы в будущем осталась возможность модифицировать беспилотник для работы с видео- и фотосъёмкой, следует основание между лучами коптера сделать пошире, чтобы потом вместить остальные девайсы.
Выбор формы квадрокоптера
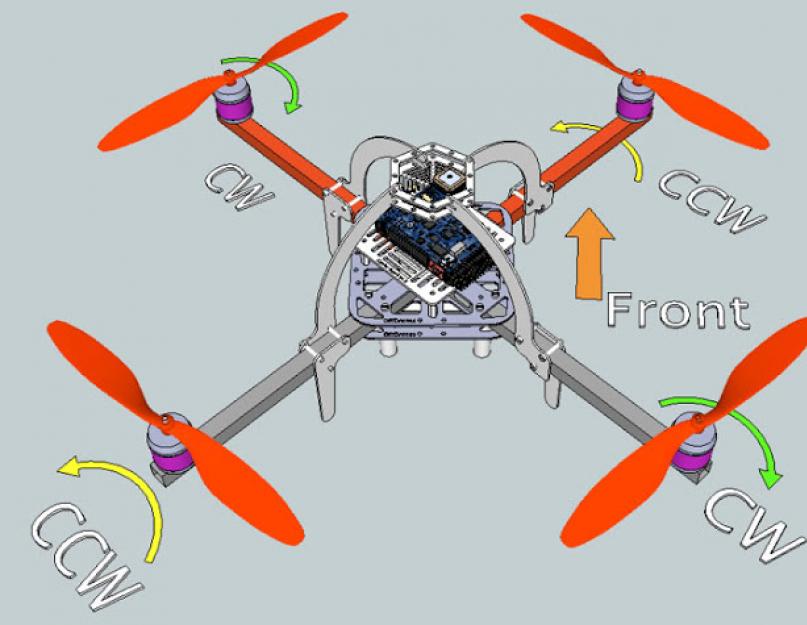
В первую очередь следует определиться с количеством лучей и винтов на коптере. Есть большое разнообразие в модификациях и внешних видах летающих дронов, исходя из количества лучей, выходящих из центра рамы, бывают три-, квадро-, гекса- и октокоптеры.
Количество пропеллеров может быть больше, чем лучей. Но название не меняется. Например, у квадрокоптера на каждом луче по два двигателя с пропеллерами — это не делает его октокоптером.
Наиболее популярной моделью среди коптероводов остаётся quatrocopter с расположением лучей в форме Х. Во-первых, сразу два мотора тянут вперёд всю конструкцию, а во-вторых, прицепленная видеокамера не будет видеть перед собой винты.

Что стоит учесть при подборе всех запчастей
Исходя из предполагаемого веса полной конструкции уже FPV квадрокоптера с камерой, следует собрать коптер с мощными моторами. Отсюда вытекает приобретение дополнительных аккумуляторов или установка сразу более ёмких.
Наглядное видео сборки:
Видео YouTube
Для облегчения конструкции раму можно сделать самостоятельно. Варианты есть: начиная от простых деревянных линеек, заканчивая алюминиевым профилем или трубками. На этом можно сэкономить. Главное, чтобы материал был прочный, так как при падении первое, что страдает — лучи коптера.
Конечно, есть уже готовые рамы, но следует остерегаться подделок, иначе после первого же краш-теста отлетит минимум одна «нога». На время навыка управления выигрышнее подручные материалы.

Лучи для квадрокоптера имеют оптимальный параметр — 30-60 см в длину от мотора до мотора.
Чтобы не пораниться и не косить листву ближайших деревьев, а так же для тестирования коптера в домашних условиях, на пропеллеры можно поставить специальную защиту.
К чему будет крепиться контроллер полёта и все остальные примочки? Здесь тоже можно включить фантазию. Конечно, картонка не подойдёт, но квадрат фанеры, пластиковое основание из-под бокса для CD-дисков — оптимально. Не тяжёлое и выдержит всё то, что требуется нацепить.
Моторы — их нужно сразу четыре. Для пропеллеров в основном подбираются по диаметру и мощности. Диаметр берётся от параметров рамы (если та самодельная, то на своё усмотрение).
Контроллеры управления двигателями нужны для регулировки скорости вращения лопастями. Мощность двигателей напрямую зависит от веса дрона в сборе.
Аккумуляторы для моторов могут быть разными по ёмкости. Лучше предоставить возможность менять аккомы на большие мощности и, конечно же, использовать не один, а сразу несколько.

Сами винты можно взять 9-12 см. Пара обыкновенных и 2 с обратным вращением. Желательно, чтобы к ним в комплекте шли крепежи сразу на несколько видов моторов.
Самое главное и самое затратное в quatrocopter — это его «мозги», а именно контроллер полёта — на нём нельзя экономить. Здесь следует учитывать будущие возможности беспилотника. Микроконтроллер лучше брать программируемый (например, Arduino Mega). Датчики к нему можно взять «всё в одном» All In One (гироскоп, акселерометр, барометр, магнитометр), или по минимуму — гироскоп и акселерометр.
Дополнительные функции:
· GPS — программирование маршрута полёта;
· «мягкая посадка» — fail safe (если радиосвязь с пультом потеряется, то коптер плавно сядет, а не рухнет на землю);
· FPV (first person view) — вид от первого лица, а наблюдение из планшета.
Передатчик на управляющую плату стоит подбирать по карману. Главное, чтобы было не менее четырёх каналов и частота 2,4 ГГц. Его можно купить для левши или правши.
С проводами, конечно, придётся повозиться, но в умелых руках это время пройдёт быстро.
На ножки коптера или на сами лучи на раме лучше прикрепить специальную мягкую подкладку, чтобы на твёрдых поверхностях посадка была легче.
Легко не будет, но будет интересно и занимательно!
Помимо основных материалов требуются еще и расходные – болты, гайки, шайбы.
На этом этапе из инструментов понадобятся ножовка по металлу, дрель и напильник.
После того, как все материалы подготовлены, приступаем к процессу:
· Любым удобным способом перенесите чертеж на заготовку текстолита и обрежьте ненужный материал по контуру.
· Соедините все получившиеся детали, закрепив их.
· Подготовьте отверстия под винты (на чертеже они красного цвета) сверлом диаметром в 3 миллиметра.
· После того, как лучи закреплены на раме, проделайте отверстия для облегчения конструкции (на чертеже это круги белого цвета).
· На лучах подготовьте отверстия для крепления двигателя.
· На последнем этапе обезжирьте раму и обклейте её двусторонним скотчем для гашения вибраций.

На последующих этапах понадобятся такие элементы: плата, контроллеры двигателей, пропеллеры, двигатели, аккумулятор и зарядное устройство для него, передатчик и приемник.
Для того, чтобы закрепить контроллеры на плате-адаптере, стоит использовать медный провод без изоляции. После этого производится припаивание проводов питания, провода шины, тумблер для включения и выключения питания.
При размещении контроллеров на плате стоит помнить, что все они должны быть направлены к соответствующим двигателям.
Следующий этап – установка двигателей. Начинается он с припаивания проводов к выводам двигателей их изоляции. Затем устанавливаются сами двигатели на концах лучей и закрепляются болтами с нижней стороны «ноги».
После этого наступает ответственный момент крепежа «мозга» квадрокоптера – платы-адаптера. Лучше устанавливать её на небольшие резиновые демпферы. Важно защитить плату от влаги и пыли, так что тут же закрываем её любым пластиковым колпаком. Его форма и прозрачность зависит исключительно от ваших предпочтений и на сохранность платы никак не влияет.

В подготовленный отсек крепится аккумулятор, который также лучше закреплять на резиновой прослойке.
На последнем этапе закрепляем винты на двигателях, подключаем передатчик и светодиодную подсветку.
От общего — к частному. Рама квадра должна быть прочной. Для ее изготовления подойдет кусок фанеры (150 х 150 мм), в качестве каркаса можно использовать квадратный профиль из алюминия (14 х 14 мм).
Профиля понадобятся и для изготовления лучей. Длина каждого из них от центра конструкции должна составлять 300 мм. На них, кстати, можно приспособить куски пенопласта или резины, которые будут смягчать приземление.
Далее установка платы. Ее нужно купить. Рекомендуется приобретать плату, уже оснащенную всеми датчиками — гироскопом, акселерометром, барометром и магнитометром — AllInOne. Есть варианты плат также и GPS-приемником. Датчики можно крепить к конструкции на толстый скотч или силикон — это поможет избежать сильной вибрации.
Монтировать ее надо в центре конструкции. Саморезы должны надежно прикрутить плату к концам лучей и проходить через фанеру. Рядом с ней должен находиться приемник. Его можно приклеить суперклеем.

Двигатели квадрокоптера должны располагаться на одинаковом расстоянии. Поэтому перед их расстановкой нужно сделать точную разметку на лучах и уже потом сверлить отверстия. Кстати, пространство для хвоста вала нужно делать насквозь, на всю его ширину так, чтобы он не задевал его края.
Теперь немного о проводах питания регуляторов скорости. Они соединяются параллельно с помощью переходников. Там, где к ним подключается батарея, следует делать разъемное соединение.
Теперь остается только подключить провода к соответствующим двигателям и установить “мозги”. Найти прошивку для платы (Arduino) в интернете не составляет труда. Сначала закачивается она, потом настройки. Во время установки программы будут появляться пошаговые инструкции. Им нужно четко следовать, чтобы отладить управление аппаратом и откалибровать его.
В меню программы есть раздел AC2 Sensor. Здесь проверяется работа датчиков и приемников. Все повороты и изменения уровней должны с максимальной точностью отражаться на колебаниях стрелки и светодиодных показателях.

После всей этой отладки можно устанавливать пропеллеры и тестировать полет. Аппарат при этом лучше разместить подальше от себя. Газовать следует плавно. Если дрон поднялся в воздух — великолепно. Если его начало трясти, следует перейти к настройкам PID. Возможны и другие нюансы отладки через программу.
Как разумно подобрать двигатель для квадрокоптера? Несомненно, данную деталь стоит подбирать исходя из характеристик и возможностей летающего аппарата. Использование мотора необходимо только в больших квадрокоптерах, иначе его наличие будет неоправданно и аппарат попросту не будет работать.
Главным правилом является то, что выбирать мотор стоит уже после окончательной сборки квадрокоптера. При планировании присоединять к летающему устройству видеокамеру или иное устройство, стоит учитывать дополнительный вес. Чтобы не перегружать аппарат, необходимо рассчитать тягу, которую можно посмотреть по специальным таблицам. К примеру, если вес аппарата равен 1,5 килограмма, то тяга должна быть в 2 раза больше, то есть быть равной 3 килограммам.
Чтобы правильно подобрать двигатель квадрокоптера, стоит тщательно изучить все его характерные свойства. Не менее важную роль играют винты аппарата. Квадрокоптер висит в воздухе за счет нескольких пар несущих винтов, вращающихся в различных направлениях.
Как раз для того, чтобы винты нормально работали, требуется подобрать двигатель на основе параметров своего квадрокоптера. Винты потребляют большую энергию двигателя, и мощность мотора важна при покупке.
Для подбора правильного мотора рекомендуем ознакомиться с различными видеозаписями, где вам подробно расскажут о хороших деталях для квадрокоптера. За счет советов, которые будут давать уже опытные пилоты, можно собрать уникальный квадрокоптер с мощным двигателем.
Зачем нужен мощный двигатель? Во-первых, он позволяет летать аппарату намного быстрее и дольше, совершать определенные маневры. Во-вторых, на квадрокоптер можно повесить дополнительный груз, к примеру, камеру, которая будет снимать материалы при полете на высоте. За счет этого можно сделать качественные снимки.
Следовательно, подбирать двигатель необходимо основываясь на том, какой квадрокоптер вы желаете собрать. Следует подбирать правильную мощность двигателя, иначе аппарат может либо не взлететь, либо вовсе будет неуправляемым. Чтобы избежать этого, необходимо прислушиваться к советам специалистов, и тогда собрать квадрокоптер будет очень просто.
Желание иметь собственный квадрокоптер, вполне понятно, ведь сегодня время, когда мир переживает настоящий бум. Стоимость «хорошего» дрона, оборудованного камерой большого разрешения для ведения видеосъемки, «по карману» не всем.
{ ArticleToC: enabled=yes }
Но, выход есть – квадрокоптер своими руками. Пошаговая сборка кажется сложной только на первый взгляд.
Весь этап изготовления своими руками состоит из:
- сборки рамы;
- закупки необходимых запчастей;
- сборки;
- проведению проводки.
- Изготовление рамы
Ее можно сделать своими руками из фанеры размером 150х150 мм или алюминиевого профиля размером 14х14 мм. Винтами прикручивают по диагонали лучи, длина которых равна 300 мм. Отверстия для моторов можно просверлить уже после того, как квадрокоптер будет собран.
Для посадочных «лыж» подойдет тонкая лента из алюминия. Ее можно выбрать и для изготовления держателя аккумуляторной батареи.

Необходимые запчасти
- аккумулятор для дрона – 8 шт.;
- батарея для аппаратуры;
- зарядка – 1;
- пропеллеры на 10 дюймов;
- плата управления (HK multi-rotor control board 2.1);
- аппаратура Turnigy 9x.
Все вместе обойдет вам примерно в 120 долларов. Но, ждать посылку из Гонконга придется около 20 дней. Плюс к этому 5 дней, пока можно получить импорт. К указанной сумме добавить нужно 3-15 баксов за доставку.
Нужно максимально точно по центру платформы разместить плату управления. Отверстия для нее просверливают через лучи и фанеру. Плата к лучам крепится с помощью саморезов по металлу.
С платой рядом приклеивают приемник, применив сумермегаклей. Им же можно клеить к лучам антенну. Если назначение каналов у него и платы совпадают, их допускается трехжильными шлейфами.

Следующий шаг сборки квадрокоптера своими руками – сверление отверстий для мотора. На лучи нужно на одинаковом расстоянии, взятом в «на глаз», нанести отметку. Двигатель подойдет с расстоянием между центрами отверстий равным 19 мм и внутренней обычной резьбой М3.
Для вала мотора, нужно просверлить отверстие. Рекомендуется его делать сквозным и на всю ширину квадрата, чтобы за края подставки не цепляться:

Прикручиваем выводами моторы к платформе, пользуясь винтами М3 длиной не больше 4 мм, поскольку такой размер имеет профиль. Делают это, чтобы не испортить обмотку, не способствовать межвитковому замыканию в случае повреждения лака на проводе.
Проводка
Теперь пришло время перейти к проводке. Из четырех регуляторов скорости нужно спаять «паука», припаяв провода прямо в гнезда переходников.

Используются разъемные соединения в единственном месте – при соединении «паука» с батареей. Все остальные соединения паяют и затягивают в шнур термоусадочный, чтобы во время вибрации провода не выпали.
Согласно номерам моторов на плате, подключаем сигнальные провода драйверов. Если используется «плюсовая» схема полета, подключать их нужно к штырям М1-М4 (когда научитесь управлять, прошивку можно изменить).
Схема подключения приводится ниже:

В результате получится такой квадрокоптер, сделанный своими руками, весом один килограмм. Можно проводить тестовый полет.

Но, прежде, необходимо зарядить батарею, подключить ее и передатчик. Теперь время нажать вправо и вниз ручку газа. На плате должен загореться красным цветом СИД. Следующий момент – ручка газа передвинута вперед. Двигатели должны заработать, а квадрокопрет «отправиться» в полет.
Это был простой квадрокоптер своими руками. Если же нужно квадрокоптер собрать самому, да еще с камерой, отличался бы который неплохой производительностью и хорошими летными качествами, есть другой вариант. Сборка зависит от конкретной модели, особенностей электроники и числом элементов конструкции.

Детали для дрона своими руками с камерой
К ним относятся:
- двигатель D2822/14 – 4 шт.;
- регулятор оборота – столько же;
- роторы вращения – левые и правые;
- силовой разветвитель, или разъем на 3,5 мм для подключения регуляторов оборотов.
Не обойтись без платы для регулировки квадрокоптера своими руками, подключаемой к компьютеру через USB — MultiWii ATmega32U4. Чтобы запуск состоялся нужны аккумуляторы Nano Tech 2200 30C – 4 штуки, поскольку при использовании одного накопителя время полета будет небольшим.
Для восстановления энергии в них необходима зарядка. Также потребуется для сборки своими руками контроллер, с помощью которого осуществляется регулировка полетом. Для пульта подойдет устройство Turnigy 9x. Улавливать сигналы с его помощью можно на расстоянии 800-900 метров. Передатчик сигнала идет в комплекте с пультом.
Сборка
Как и в первом случае, она начинается с изготовления рамы, для которой взять можно пластиковые трубы. Поскольку вес их небольшой, квадрокоптер будет мобильным, а развиваемая им скорость высокой. К тому же, такой каркас легко починить в случае «аварии».
К углам прямоугольного каркаса крепятся роторы. Конструкцию необходимо оснастить «ногами», к которым прикрепить камеру.
Силиконовые провода помогут подсоединить двигатели к каждому пропеллеру. Аккумулятор с электроникой неплохо закрепить на платформе, установленной в центре рамы. Прежде, чем приступить к монтажу электронной начинки, следует скачать схему подключения, найти которую несложно на форумах. Если нужно, ДУ можно перепрошить с учетом последних обновлений. Там же, на форумах, рассказывают, как перепрошить пульт.

Собрать квадрокоптер своими руками по силам не каждому, поскольку он требует инженерных навыков. Но, если имеется инструкция и схема, процесс по созданию летающего девайся упрощается.
Пошаговая сборка
Люди, желающие собрать своими руками квадрокоптер, стремятся сэкономить, что вполне понятно. Но причина эта не единственная: многих вопрос интересует потому, что их хобби по управлению беспилотником переросло в желание участвовать в гонках и по возможности стать в них победителем. А для этого необходима доработка конструкции.

Сборка из комплекта
Обзаводясь соответствующим комплектом, можно значительно упростить процесс сборки своими руками ЛА.
Стоит он дешевле готового квадрокоптера в разы, поскольку заниматься сборкой, прошивкой, калибровкой и точной настройкой будет пользователь. Основным достоинством комплектов является отсутствие необходимости подбирать чипы, мощность двигателей, вес корпуса.
О сбалансированности, влияющей на поведение квадрокоптера в полете, тоже не стоит беспокоиться – всеми необходимыми параметрами, в том числе запланированной скоростью и временем нахождения в полете он обладать будет.
Комплекты позволяют собирать разборные и монолитные дроны своими руками. Тут решать пилоту, какую он желает иметь конструкцию. Разборными интересуются те, кто предпочитает модели габаритные, но и одновременно легко переносимые.
Но, для заметки: такие модели не отличаются привлекательным дизайном, поскольку внешнего корпуса, выполняющего декоративную и защитную функцию, в комплекте нет.
Как собрать подобную конструкцию своими руками, подробно описано в прилагаемой инструкции.
Как правило, начинается все с установки на пластиковый, карбоновый или металлический экзоскелет моторов. Затем размещаются PIN-кабели, регулирующие мощность моторов. Позже крепят на корпус приемник сигналов и управляющий модуль – мозговой центр.
На завершающей стадии устанавливают светодиоды, фиксаторы, аккумуляторы.
Сборка на этом заканчивается, но начинается самое интересное – прошивка, калибровка устройства и тонкая настройка, занимающая от 30 минут до 3 часов (в зависимости от производителя входящих в комплект деталей). К этому моменту аккумулятор должен быть полностью заряженным.
Сборка квадрокоптера из подручных материалов
Хотя она и популярна среди любителей «полетать» на беспилотниках, стоит признаться, что получить полноценный коптер она не позволяет. Покупать детали придется однозначно, только брать не весь комплект, а самые необходимые: винты, двигатели, аккумулятор, управляющую плату и приемник, управляющую аппаратуру, без которой невозможно управлять устройством.
Чтобы комплектующие в воздухе не развалились, их необходимо закрепить на легком, но прочном каркасе. Для изготовления такого подойти может все: палочки от мороженного, пластиковые бутылки и крышки.
Создавая корпус, нельзя забывать об устойчивости конструкции, собранной своими руками, равновесии, полетных качествах, легкости.
Если знания позволяют, схему можно придумать свою, если нет – найти в Интернет.
Первая сборка, как правило, лишь начало. В дальнейшем она будет многократно дорабатываться.

Есть одна хитрость, помогающая избежать сложных расчетов по балансировке – нужно выбрать конкретную модель, а под нее уже заказывать из базового списка комплектующие.
Главное, указывать правильно детали. К примеру, обязательно должно быть в списке по два мотора левого и правого вращения и соответствующие им винты. Иначе функционировать устройство не будет.
Если есть возможность, стоит заказать деталей больше – на случай замены бракованных (такое бывает). В отличие от продающихся наборов, своими руками (голыми) не получится собрать квадрокоптер.
Потребуются:
- клеевой пистолет;
- отвертка;
- паяльник;
- двухсторонний скотч;
- изолента.
Когда рабочая модель будет готова, настанет время модернизации, в результате которой у квадрокоптера могут появиться светодиоды, антенна, пищалки (биперы) и др., увеличивающие функциональность.
Видео: Квадрокоптер своими руками
Перед тем, как начать делать беспилотник, стоял выбор, какую летательную модель брать за основу: квадракоптер или самолет? Так как с коптерами я в свое время наигрался, знаю их основной минус: чаще всего время полета составляет 10-20 минут. Лично для меня это очень мало, поэтому было решено взять за основу самолет.
В качестве самолета я выбрал Bixler 2, в нем очень много плюсов, а именно:
- Неубиваемость
- Размах крыльев (1.5m)
Теперь осталось дело за автопилотом. В качестве «мозгов» взят Raspberry PI B+ с платой NAVIO, на которой располагаются нужные нам датчики:
- GPS\GNSS
- акселерометр, гироскоп, магнитометр
- датчик давления для расчета высоты
- 4-х канальный АЦП
- 16-канальный ШИМ-генератор
- FRAM, энергонезависимая память
- RGB LED
- PPM вход
Возможно многие слышали, а кто-то успел и опробовать ArduPlane. Это open source проект автопилота для коптера/самолета/ровера. К счастью, команда EMLID, которая занималась разработкой платы NAVIO, сделала порт ArduPlane на Raspberry PI. Так что все, что надо, это склонировать репозиторий и скомпилировать все это дело на малинке, после чего закрепить наш автопилот на самолете — и в путь.
Монтируем наш автопилот к самолету:

Тут я и столкнулся с проблемами: места очень мало, пришлось отказаться от стандартной кабины пилота, которая шла вместе с самолетом, и сделать из пустой баклажки от кока-колы новую кабину пилота, покрасив ее в серебристый цвет. Оказалось, что смотрится намного лучше, чем стандартная.
Скажу честно, все получилось не с первого раза. Так как запускать самолет я мог только по выходным и не всегда улыбалась погода, то с момента, когда у меня был готов самолет и до первого успешного запуска, прошло полтора месяца.
Я полетал в режиме стабилизации: если не двигать рычаги на пульте управления, то самолет сам себя выравнивает и летит по прямой. Следующим этапом будет полет по GPS точкам с заранее проложенным маршрутом.
Теперь, возможно, кому-то будет интересна цена вопроса. Итак:
- Bixler 2 — 90$(без пульта, он у меня был)
- Аккумулятор 2600mAh — 50$
- Raspberry Pi B+ (sd card)- 45$
- NAVIO — 149$
В сумме у меня получилось $334 за весь комплект, готовый к полету. Кто-то скажет, что это дорого и, возможно, будет прав. Однако я считаю, что это даром, при том что у меня есть летающий линукс, к которому я могу подключить 3G модем и изменять курс полета везде, где есть покрытие интернета.
контроллера полета :
Студенты сделали беспилотник
Первыми задачами студенческого конструкторского бюро является развитие научно-технического творчества студентов и молодежи. Студенты конструируют не только сами схемы, но и их начинку, то есть те мозги, которые являются интеллектуальной начинкой всех этих технических систем. В этом видео представили самодельный летательный аппарат – беспилотник.
В СКБ долгое время разрабатывалось система передачи информации на большие расстояния, это 300-400 км. Хотим управлять этим беспилотником на расстоянии 300 км. Что для этого делаем? Поднимаем еще несколько беспилотников между ними, и они осуществляют ретрансляцию сигналов, то есть для решения этой задачи были разработано специальное оборудование, которое протестировали на этом беспилотном летальном аппарате.
Вы видите антенну, которая осуществляет прием и передачу информации. Внутри автопилот, который удерживает самолет по определенному курсу.
Был разработан беспилотный летательный аппарат, но по форме напоминающий летающую бочку или ведро втулку. Он имеет профиль крыла, внутри устанавливается двигатель и . Рули, которыми осуществляем стабилизацию во время полета. Когда не нужно зависать на месте, а передислоцироваться быстро, он может ложиться на крыло и по сути летит как реактивная бочка. За счет того что винт защищен вы можете допустим спокойно с помощью этого устройства осматривать здания.Инициатором построения квадрокоптеров был студент первого курса Павел Сидоренко, он строил квадрокоптеры разных схем и отрабатывал систему пилотирования. Встал вопрос о квадрокоптере для реального применения, например для аэро фото, и кино съемки. Сейчас он имеет настроенный автопилот и систему аэро- кино- съемки. Он ориентируется по GPS навигатору, прокладывает свой маршрут и может вернуться в точку вылета. Съемка пейзажей, строений, кадастровые объекты можно фотографировать. Также наблюдения за территориями можно проводить с помощью этого аппарата. Ну и военные структуры. Например, охрана границ, каких-то складов.
На базе СКД делаем 3D-принтеры, печатать он может подобные пластиковые детали, достаточно сложные по конструкции. Прелесть еще данной технологии то, что она в свободном доступе, как Linux система. То есть любой желающий может взять исходники и на свое усмотрение дорабатывать. Доработками делиться с сообществом. Делается деталь в 3D-редакторе, потом соответственно добавляется в специальную программу, которая разбивает 3D-модели на слои, принтер по командам программы наносит слой за слоем. Все, что можно смоделировать, можно напечатать.
Тема мобильных ретрансляторов. В СКБ была разработана еще специфическая вещь, похожая на летающую тарелку. Мобильный ретранслятор, который поднимается в воздух в быстрые воздушные слои 15-20 км и там зависает. Сверху ретранслятор будет обклеен солнечными батареями.
Самодельная летающая тарелка

Чтобы летающая тарелка оставалась на месте, приготовлены ушки, они расположатся по краям.
Если этот беспилотник поднимем на высоту 1000 и выше метров, возникает возможность покрыть большую поверхность. Весь Новосибирск можно покрыть без дополнительных конструкций. Профиль тарелки является крылом. Поэтому она не требует постоянной скорости. При падении скорость снижения мала. Падает, как лист дерева.
Hubsan Spy Hawk - готовая модель беспилотника В нашем журнале мы неоднократно писали об устройствах, вобравших в себя все передовые достижения современных коммуникационных и вычислительных технологий, - беспилотных летательных аппаратах. Однако создание беспилотников - прерогатива не только государств, обладающих мощным военно-промышленным комплексом. В последние годы электронные комплектующие для авиамоделизма стали очень доступными. Чтобы собрать планер и оснастить его электронной «начинкой» с не самыми плохими характеристиками, требуется потратить меньше денег, чем стоит новый iPhone. В этой статье мы укажем отправные точки для создания беспилотного самолета, управляемого от первого лица с помощью установленной на нем камеры. В отличие от популярных сегодня вертолетов-квадрокоптеров такой аппарат может дольше держаться в воздухе и нести большую полезную нагрузку. Кроме камеры, служащей для контроля и управления, в подобный самолет можно установить высококачественную видеокамеру наподобие GoPro HD Hero и снимать впечатляющее видео высокого разрешения из-под облаков. Мы расскажем о том, где купить необходимое оборудование и как собрать модель, избежав подводных камней. Также вы узнаете, где можно приобрести готовые, не требующие сборки модели.
Выбор самолета
При посещении реальных магазинов или сайтов, продающих радиоуправляемые модели, глаза разбегаются от разнообразия. Поэтому в первую очередь надо определиться с назначением вашего самолета. Если есть желание поставить на него камеру и летать «от первого лица», то безальтернативный выбор - электрические модели. Электрический привод дает меньше вибраций, чем бензиновый, и проще в обслуживании. Его можно собирать дома, «на коленке», не боясь испачкаться.
Помимо этого, если вы собираетесь летать далеко, высоко и, главное, долго (до одного часа), то вам однозначно нужен планер или его подобие. Если же хочется модель побыстрее и поманевренней, то выбирать нужно самолет с меньшей площадью крыла и, возможно, с бесхвостой аэродинамической схемой. Для длительных полетов с управлением через камеру винт должен располагаться сзади, а не спереди самолета. Таким образом, при съемке он не будет мелькать в кадре. К тому же при жесткой посадке вся винтомоторная группа останется цела.
Традиционные материалы для планера носят названия EPO или EPP. Первый - это некое подобие пенопласта, который не разъедается суперклеем и имеет большую жесткость, а второй - вспененный полиэтилен - обеспечивает общую легкость и жесткость модели. Преимущество этих материалов также в том, что они ремонтопригодны. Направление радиоуправляемого авиамоделизма, в котором полеты контролируются с помощью установленной на самолете камеры, называется FPV. Расшифровывается эта аббревиатура как First Person View, а переводится как «вид от первого лица». Самолеты класса FPV - это не красивые копии, а подчиненные своей задаче планеры, на который не ставят даже шасси. Каждый грамм веса здесь на счету, так как важно установить достаточно тяжелый емкий аккумулятор. Запуск таких самолетов производится с руки, а посадка - просто на фюзеляж.
Управление
Необходимый элемент для того, чтобы, сидя в кресле на земле, летать над облаками, - система управления. Она состоит из двух компонентов: пульта управления и приемника. Пульт - это передатчик управляющих сигналов.
Сегодня существует множество брендов этих устройств, различающихся по числу каналов и используемым частотам. Для простоты мы возьмем самый новый и распространенный на частоте 2,4 ГГц.
Что касается каналов, то каждый из них отвечает за определенное действие: газ, руль высоты, руль направления, управление сервоприводами камеры и т. д. Пульт покупается один раз и на много лет вперед, поэтому стоит задуматься о том, чтобы каналов было побольше - по крайней мере, не меньше шести.
Пульт управления - это одна из самых дорогих частей всего нашего беспилотного комплекса. Среди компаний-производителей наиболее популярны Futaba, JR и Spektrum. Есть, впрочем, и те, кто покупает китайские пульты (например, Turnigy) за 2000 рублей и вполне удовлетворены ими. Мы использовали семиканальный пульт Futaba. К каждому пульту необходимо устройство, которое принимает с него сигнал и отдает его на органы управления самолета, вертолета и т. д., то есть приемник. Он или идет в комплекте с пультом, или приобретается отдельно. Китайские приемники вполне неплохи, при этом стоят они раза в три меньше брендовых.
Радиус действия пультов на частоте 2,4 ГГц составляет в среднем километр. Это примерная дальность, при которой самолет еще различим невооруженным глазом.
Сборка
Налетавшись в авиасимуляторе и имея в шкафу пульт, приемник и самолет, можно начать сборку. Самое сложное, что, возможно, придется освоить, - это паяльник. Он потребуется часто, однако на первом этапе, скорее всего, нужно будет только перепаять разъемы - ради уменьшения веса самолета.
Итак, у вас есть пульт-передатчик, приемник и самолет. Для того чтобы управлять плоскостями самолета, необходимы сервоприводы. О том, какие именно подойдут для вашего самолета, вы можете спросить в магазине или узнать в специальных разделах на веб-сайте. Сервоприводы подсоединяются к приемнику.
Еще вам необходимы бесколлекторный двигатель и регулятор оборотов к нему. Именно регулятор отвечает за то, с какой скоростью будут крутиться лопасти винта, когда вы будете двигать рычажком. К регулятору же подключается аккумулятор. Кроме того, через него подается питание на приемник, а затем через приемник попадает на сервоприводы.
Собранную конструкцию необходимо сначала проверить на столе, не вставляя в самолет. Если все крутится и работает, можно помещать в модель. Аккумулятор - деталь, которая будет постоянно выниматься и меняться, так что к его установке необходимо подойти тщательно. Еще раз проверьте все детали, а также центровку. Расположение центра тяжести указано в инструкции к самолету. Это важный момент, и пренебрегать им нельзя.
Подсказка: центровка, немного сдвинутая вперед от обозначенной, поначалу даже поможет в пилотировании. После отцентровки и еще одной проверки всех систем можно провести пробный полет. Если все в порядке, самолет не сломался, не улетел в лес или речку, а цел и работоспособен, то можно задумываться о видеооборудовании.

Видеооборудование
Видеотехника, которая доступна в свободной продаже в отечественных и зарубежных магазинах, различается по мощности и частоте. Возможны следующие диапазоны частот: 900 МГц, 1,2 ГГц, 2,4 ГГц и 5,8 ГГц. Важно понимать, что частота видеотракта не должна совпадать с частотой управления, то есть в нашем случае вариант 2,4 ГГц можно исключить. В связи с доступностью оборудования хорошим выбором будет частота 1,2 ГГц.
После выбора частоты необходимо определиться с мощностью. Для этого параметра возможны варианты от 10 мВт до 2 Вт. Чаще всего используется 600–1000 мВт. Отметим, что мощность в 100 мВт не даст почти двукратного прироста дальности по сравнению с 600, а лишь на 20% и только на стандартных антеннах типа «штырь». Как правило, магазины предлагают среднюю мощность в 800 мВт.
Кроме того, нужны камера и антенны, а также питание. Камеру - простую маленькую черную коробочку с объективом - можно найти в магазине товаров для видеонаблюдения. У этого компонента есть несколько важных для вас параметров. Первый из них - рабочий вольтаж. Желательно использовать 12 В, как и для всего остального оборудования. Следующий параметр - количество ТВ-линий. Выбирать надо устройство с разрешением от 540 линий или выше - верхней границей может быть 700.
Очень важный момент - качество сигнала (и для видео, и для управления). Оно зависит в большей степени не от мощности передатчика, а от антенн. На самолете поставьте Vee-антенну, а на земле - направленную. Последняя даст огромный прирост в дистанции по прямой, однако направив такую модель себе за спину, вы потеряете сигнал. Также нужно понять, на чем смотреть передаваемую с самолета картинку. Для начала можно вывести провод с видеоприемника на простой телевизор - подойдет самое дешевое автомобильное ТВ-устройство, работающее от 12 В.
Собранную конструкцию опять проверьте на столе. Если на дисплее есть картинка, монтируйте камеру с передатчиком и аккумулятором на самолет, а приемник, телевизор, антенну и аккумулятор, например, на фотоштатив.
Важно: нельзя включать передатчик (и пульт управления, и видеопередатчик) без антенны - в таком случае все оборудование сгорит.
 Модель на заднем плане изготовлена из пеноплата EPO, и ее очень сложно разбить. Skywalker в центре выполнен из EPP
Модель на заднем плане изготовлена из пеноплата EPO, и ее очень сложно разбить. Skywalker в центре выполнен из EPP  На фотоштативе закреплены направленная антенна, телевизор, конвертер видеосигнала, передатчик для очков и аккумуляторы
На фотоштативе закреплены направленная антенна, телевизор, конвертер видеосигнала, передатчик для очков и аккумуляторы
Телеметрия
Телеметрия - важный элемент для полетов «по камере». Она позволяет выводить на экран множество полезных параметров, таких как заряд аккумулятора, потребляемый ток, высота полета, расстояние до точки старта, направление на точку старта, GPS-координаты, крен, тангаж, режим полета и другие, в зависимости от сложности OSD (On Screen Display). В последнее время появилось много простых решений, причем OSD комбинируется с автопилотом, который в случае обрыва связи из-за выхода за зону приема или просто по нажатию на кнопку вернет самолет в точку старта. Стоимость автопилотов начинается от 4500 рублей, что не так уж много, учитывая общую стоимость оборудования, - потерять самолет целиком обойдется намного дороже. Кроме того, автопилот предоставляет систему стабилизации полета, позволяющую расслабиться и получать удовольствие от созерцания окрестностей, не боясь порывов ветра или собственных ошибок пилотирования.
 Fat Shark - одна из популярных моделей очков с беспроводной передачей изображения и трекером положения головы
Fat Shark - одна из популярных моделей очков с беспроводной передачей изображения и трекером положения головы
Увеличение дальности полета
Есть два пути увеличения дальности - так называемая LRS (Long Range System - система дальнего действия) и усилитель самого пульта.
Система дальнего действия: Обычная частота LRS - 433 МГц. Данная система подключается к тренерскому разъему пульта управления. По сути, это еще один передатчик, на который с вашего пульта через кабель поступают сигналы, затем передающиеся на идущий в комплекте приемник с частой 433 МГц.
Усилитель пульта: подключается вместо штатной антенны. Он не потребует дополнительных приемников - можно использовать те, которые имеются.
Дополнительное оснащение
Картинку с OSD можно транслировать в видеоочки. Модели марки Fat Shark, стоимость которых начинается от 11 000 рублей, даже умеют отслеживать движение головы и управлять камерой на самолете. Конечно же, необходимо соблюдать технику безопасности, избегать «залетаний» за спину и стараться не летать там, где есть хоть малейшие сомнения в «национальной безопасности». Лучше всего производить полеты на открытой местности за городом.
Готовые модели
Если вам хочется побыстрее подняться в небо, то можно купить готовую модель для полетов с использованием камеры. Правда, возможностей у таких летательных аппаратов меньше.
AR.Drone 2  Квадракоптеры - летательные аппараты с четырьмя роторами - из-за своей простой конструкции часто используются в любительском моделировании. Они могут зависать на месте, что делает их подходящими для видеосъемки с высоты. Один из интересных образцов квадрокоптеров можно купить по цене около 13 000 рублей. AR.Drone 2.0 может управляться со смартфонов или планшетов. Время его полета составляет 15 минут, а дальность ограничена сигналом Wi-Fi.
Квадракоптеры - летательные аппараты с четырьмя роторами - из-за своей простой конструкции часто используются в любительском моделировании. Они могут зависать на месте, что делает их подходящими для видеосъемки с высоты. Один из интересных образцов квадрокоптеров можно купить по цене около 13 000 рублей. AR.Drone 2.0 может управляться со смартфонов или планшетов. Время его полета составляет 15 минут, а дальность ограничена сигналом Wi-Fi.
Сайт: ardrone2.parrot.com Hubsan Spy Hawk  Комплектов готовых моделей с управлением по принципу FPV существует множество. Один из них - Hubsan Spy Hawk. В наборе, который можно купить по цене около 12 000 рублей, имеется четырехканальный передатчик с дисплеем, позволяющий управлять моделью на расстоянии до 400 м. Модель оснащена камерой с разрешением пять мегапикселей. Сайт: hubsan.com
Комплектов готовых моделей с управлением по принципу FPV существует множество. Один из них - Hubsan Spy Hawk. В наборе, который можно купить по цене около 12 000 рублей, имеется четырехканальный передатчик с дисплеем, позволяющий управлять моделью на расстоянии до 400 м. Модель оснащена камерой с разрешением пять мегапикселей. Сайт: hubsan.com
Покупка комплектующих
Удобнее и дешевле покупать оборудование в интернет-магазинах. Заказы присылают по почте, а время ожидания составляет в среднем месяц. Мы перечислили только самые популярные марки и бренды. Разнообразного оборудования очень много, как и комбинаций сборки. Каждый может собирать конструкцию, опираясь на свой и чужой опыт.
Аппаратура управления: Futaba, JR, Spektrum Модели самолетов FPV: Bixler, Skywalker Видеооборудование: приемник-передатчик и камера, направленная антенна, телевизор Телеметрия: Надо сказать, что данный элемент при всех своих плюсах не всегда надежен и иногда отказывает. Для начала можно порекомендовать Storm cyclop, FY31AP или LRS 433. Имеет смысл присмотреться к их аналогам на следующих сайтах.
Онлайн-ресурсы: parkflyer.ru rangevideo.com foxtechfpv.com readymaderc.com hobbyking.com Еще один полезный ресурс, посвященный радиоуправляемым моделям вообще и FPV-вариантам в частности, - forum.rcdesign.ru. Здесь на «барахолке» можно найти недорогую аппаратуру, готовые самолеты в сборке и т. п. Впрочем, готовые комплекты продают редко и собирают на заказ крайне неохотно.



