
В процессе изучения микроконтроллеров рано или поздно возникает необходимость измерения такого метеорологического параметра окружающей среды, как ее температура. Современный мировой рынок электронных комплектующих предлагает широкий ассортимент датчиков температуры. Основные отличия между ними состоят в диапазоне измеряемой температуры, напряжении питания, области применения, габаритных размерах, способах преобразования температуры, интерфейсом для взаимодействия с пользовательской управляющей системой. Так исторически сложилось, что на текущий момент одним из самых популярных температурных датчиков является датчик DS18 B20 корпорации Dallas Semiconductor. О нем следующее повествование.
DS18 B20 – цифровой датчик температуры с программируемым разрешением преобразования.
Отличительные особенности:
1) Использование интерфейсной шины данных 1-Wire для взаимодействия с управляющей системой;
2) Наличие уникального 64-битного последовательного идентификационного кода, расположенного во внутренней ROM-памяти и предназначенной для многоточечных систем, где необходимо адресовать конкретный датчик;
3) Напряжение питания составляет 3-5,5В, что позволяет использовать его не только в 5-вольтовых системах, но и в 3,3 (большинство микроконтроллеров);
4) Диапазон измеряемой температуры составляет -55…+125 о С;
5) Точность в ±0,5 о С, правда это верно только для диапазона -10…+85 о С;
6) Разрешение преобразования определяется пользователем и составляет 9…12 бит;
7) Имеет внутренние регистры триггеров верхнего и нижнего порогов срабатывания с вырабатыванием сигнала тревоги для систем, использующих термостатическую логику работы;
8) Эти датчики программно совместимы с DS1822
и широко применяются в промышленных термостатических регуляторах, индустриальных системах, в потребительской электронике и других термочувствительных системах.
Описание и принцип работы устройства:
В своей статье я опишу пример работы с датчиком, выполненном в корпусе TO-92.
Выглядит он таким образом:
Внутри эта штуковина устроено очень просто, взгляните сами:
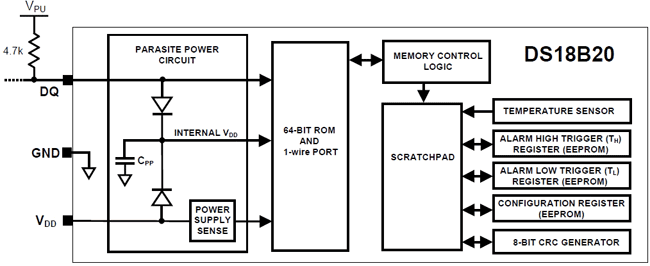
Рассмотрим поподробнее эту блок-схему.

Однако питание таким способом вносит некоторые ограничения на временные параметры датчика. Удержание линии данных некоторое время разрядит конденсатор, что приведет к обесточиванию линии INTERNAL Vdd, а соответственно и датчика в целом. Поэтому в неиспользуемое время на линии DQ должен поддерживаться высокий логический уровень. Следует отметить одно важное замечание. При операциях преобразования температуры и копирования данных из Scratchpad в EEPROM (в один из регистров), потребляемый линией INTERNAL Vdd ток может достигать 1,5мА, что непосильно внутреннему конденсатору, а на резисторе подтяжки будет большое падение напряжения, что недопустимо скажется на работе устройства в целом. Для этого необходимо организовать линии DQ схему мощной подтяжки, реализуемой по вот такой схеме:

После выдачи команды Convert T или Copy Scratchpad необходимо включить мощную подтяжку MOSFET-транзистором линии DQ не позднее 10мкс(макс.), как утверждают разработчики датчика, после чего выждать время преобразования (Tconv) или время передачи данных (Twr=10мс), причем в это время никаких действий при включенной мощной подтяжке на линии DQ быть не должно!
Про стандартное питание нужно мало что сказать, ведь тут все просто, и даже MOSFET не нужен вовсе:

Подсистема «64-BIT ROM AND 1-Wire PORT» содержит в себе уникальный 64-битный последовательный идентификационный код, расположенный в энергонезависимой памяти ROM, также в этом узле расположен интерфейс взаимодействия с управляющей системой 1-Wire. Подсистема «Memory Control Logic» осуществляет передачи данных между подсистемой интерфейса 1-Wire и памятью типа Scratchpad, которая, в свою очередь, имеет доступ к регистрам температурного датчика, регистрам установки верхнего и нижнего порогов срабатывания сигнала тревоги, конфигурационному регистру и регистру генератора 8-битноой контрольной суммы для защиты системы от неправильных данных.
При включении питания по умолчанию датчик имеет разрешение преобразования 12 бит, и сразу входит в режим пониженного энергопотребления. Для инициирования преобразования ведущее устройство должно передать команду Convert T . После преобразования температуры в цифровой код, этот код располагается в Scratchpad-памяти в виде двухбайтного слова, и датчик снова переходит в энергосберегающий режим.
Преобразование температуры.
Теперь разберемся, как преобразуется температура в датчике. По сути, внутри самого температурного сенсора располагается АЦП, и выходные данные, расположенные в регистре температуры, переносятся в Scratchpad-память. Данные о температуре имеют следующий формат:
Флаг S – флаг знака, используется для указания знака числа (S=0 – число, содержащееся в битах 10-0 положительно, и S=1, если число, содержащееся в тех же битах отрицательно, т.е. в данном случае температура представляется в дополнительном коде (коде дополнения до двух)).
При настройке на разрешение преобразования 12 бит все 12 бит (bit 11- bit 0) задействованы и содержат достоверные данные. При настройке на разрешение 11 бит содержимое бита 0 не следует принимать в расчет, при настройке на 10 бит не следует принимать в расчет биты 0 и 1 и т.д.
Сигнал тревоги – функция термостата.
Для этого предусмотрено 2 8-битных регистра, Th и Tl. В Th содержится значение верхнего порога температуры, а в Tl – соответственно нижнего. Если температура выше значение Th или ниже Tl устанавливается флаг тревоги. Этот флаг тревоги обнаруживается ведущим устройством посредством выдачи команды Alarm Search на линию DQ. Флаг тревоги обновляется при после каждой операции преобразования температуры. Кстати, только биты с 11 по 4-й регистра температуры используются в сравнении с регистром Th или Tl, отсюда следует, что функция термостата работает только для целых значений температуры. Регистры физически являются EEPROM памятью, поэтому они сохраняют свои значения при выключении питания. Сами регистры аналогичны регистру температуры, только они 8-битные, флаг S имеет абсолютно такое же значение, как и в предыдущем случае:
Этот код, как отмечалось ранее, необходим для идентификации каждого устройства на линии в системах многоточечного измерения температуры.
Формат этой памяти такой:
Младшие 8 бит отводятся для обозначения семейства, и содержат значение 0х28.Следующие 48 бит содержат уникальный серийный номер устройства. Самый старший байт содержит значение контрольной суммы CRC, рассчитываемой для младших 56 бит ROM-памяти.
Организация памяти.

Память датчика состоит из пространства памяти блокнотного типа (Scratchpad) и EEPROM-памяти для хранения данных конфигурации и значений регистров верхнего и нижнего порогов сигнала тревоги.
При выключении питания данные байта 2, 3 и 4 сохраняют свое значение в EEPROM. Ну а при включении, значение в них остаются неизменными. Байт 0 и 1 содержат значение преобразованной температуры, байты 5, 6, 7 зарезервированы для внутреннего использования и не могут быть доступны пользователю для его нужд.
8-й байт содержит значение, генерируемое встроенной логикой формирования CRC-кода для байтов с 0 по 7, что сводит к минимуму возможность ошибочного определения температуры в конечном итоге.
Следует отметить, что если функция термостата не используется, то регистры Th и Tl могут использоваться как память общего назначения – в них вы можете хранить любую информацию.
Данные записываются в байты 2, 3 и 4 начиная с младшего бита байта 2 при помощи команды Write Scratchpad . Для проверки целостности записанных данных, можно их прочитать, для чего необходимо передать датчику команду Read Scratchpad , после чего ведущее устройство должно принимать данные начиная с младшего бита байта 0.
Для сохранения данных старшего, младшего регистров термостата а так же регистра конфигурации в EEPROM-памяти, ведущее устройство должно передать датчику команду Copy Scratchpad .
Как отмечалось ранее, данные, уже записанные в EEPROM, при выключении питания сохраняются. Но при включении питания из соответствующих EEPROM-ячеек значения автоматически загружаются в соответствующие регистры памяти scratchpad. Удобно, не правда ли?:)
Кроме всего, данные, записанные в EEPROM, в любое время могут быть перезаписаны в scratchpad-память. Это необходимо например для того, когда вы изменили конфигурацию в процессе работы, а потом вам надо встать на «штатный режим работы», т.е. вернуть ту конфигурацию работы, которая была до изменения содержимого регистров памяти scratchpad. Вот собственно для этого ведущее устройство должно передать датчику команду Recall E 2 .
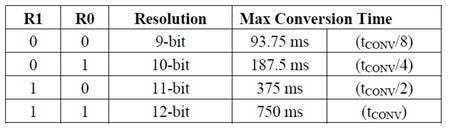
В регистре конфигурации пользователем могут определяться только 2 бита: R0 и R1. Эти биты определяют разрешение преобразования температуры, и по дефолту установлены в 1, что и определяет изначальную настройку на 12-битное разрешение преобразования.
Все возможные конфигурации этих битов и соответствующие разрешения представлены в таблице ниже. Следует отметить, что чем больше разрешение преобразования, тем больше время преобразования, например, для 12-битного разрешение время преобразования составляет 750мс (макс.).
Взаимодействие с управляющей системой.
DS18B20, как отмечалось ранее, для связи с ведомым устройством используют интерфейсную шину данных 1-Wire. Поэтому для его подключения управляющая система должна обеспечивать выход с открытым стоком или с Hi-Z состоянием линии.
Внутренняя конфигурация интерфейса датчика показана ниже:

В неактивном состоянии (в состоянии простоя) линия DQ подтянута резистором к «+» питания. Таким образом между транзакциями (передачами данных) эта линия всегда должна удерживаться в этом состоянии. Если по какой-либо причине транзакции должны быть приостановлены, линия DQ должна удерживаться в высоком логическом уровне, если эта передача дальше будет возобновлена. В процессе остановки транзакции мы сколько угодно долго можем держать линию DQ в высоком логическом уровне, начиная с 1мкс. Но, если шина данных будет удержана в низком логическом уровне дольше 480мкс, произойдет полный сброс всех датчиком, присутствующих на этой шине.
Последовательность операций для обмена.
Каждый раз при обращении управляющей системы к датчику должна быть соблюдена следующая последовательность действий:
1) Инициализация;
2) Команда ROM (за которым следует необходимый обмен данными);
3) Функциональная команда датчика (за которой следует необходимый обмен данными).
Если какой либо шаг при обращении к датчику отсутствует – датчик не будет реагировать. Исключение составляют команды Search ROM [ F 0 h ] и Alarm Search [ ECh ] , после их выполнения мастер должен вернуться к первому шагу управляющей последовательности.
Итак. Все транзакции начинаются с инициализации. Эта операция сопровождается выработкой ведущим устройством импульса сброса, на который ведомые устройства (в данном случае датчик(-и)) передают ведущему импульс присутствия, которые дают ему знать, что датчики подключены и готовы к работе.
Вообще интерфейсная шина 1-Wire, реализуемая в датчике, определяет несколько типов сигналов на линии данных: импульс сброса, импульс присутствия, запись 0, запись 1, чтение 0, чтение 1. Все эти операции реализует ведущее устройство, за исключением импульса присутствия. Его формирует только датчик(-и).

Итак, для начала ведущее устройство переходит в режим передатчика и устанавливает линию DQ в 0 на время не менее 480мкс (выделено жирным черным цветом). Это сбрасывает датчик. Затем линию необходимо отпустить, и перевести ведущее устройство в режим приемника, при этом подтягивающий резистор установит линию данных в высокий логический уровень (выделено тонким черным цветом). После того, как датчик почует нарастающий фронт, датчик выждет время 15-60мкс и своим аппаратным интерфейсом сбросит линию данных в 0, и будет ее держать в течение 60-240мкс. По истечении этого времени датчик отпустит линию и она установится в уровень логической 1 в течение не менее 480мкс после обнаружения датчиком импульса сброса.
Теперь поговорим о том, как осуществляется процесс передачи данных. Вообще, передачи бита. Дело в следующем. Берется отрезок времени, и в течение этого времени мастер смотрит, что там у нас на линии, допустим 1 – значит записали 1, если 0 – значит записали ноль. Но это только абстрактное объяснение. На самом деле там есть некоторые нюансы, связанные с временными рамками всего этого дела.
Смотрим картинки:

Все начинается с того, что ведущий должен опустить линию данный в низкий логический уровень, и с этого момента начинается слот записи/чтения 1/0, длящийся от 60 до 120мкс. Между слотами записи/чтения линия данных обязательно должна установиться в 1 на время, не меньшее времени восстановления (1мкс). Для организации слота записи 0 необходимо все время слота держать линию данных в 0, если же необходимо записать в датчик 1, то сначала сбрасываем линию данных в 0, затем ждем не менее 1мкс и отпускаем линию в 1, в течение слота записи 1 (60-120мкс) будет записана 1 в датчик (см. верхний правый рисунок).
Собственно говоря, если в течение 15-60мкс после старта будет обнаружена 1 на линии данных, то запишется 1, а если в течение 60-240мкс обнаружится 0 – то и запишется 0.
Чтение данных сопровождается ведущим устройством, когда он сбрасывает линию, ждет не менее 1мкс, и в течение 15мкс смотрит, что на линии творится: если остался 0, то датчик передает 0, если переключилась в 1, - то и передалась 1.
Команды.
ROM-команды.
Эти команды должны следовать за последовательностью инициализации и содержат инструкции поиска соответствующего датчика и т.д. Разрядность каждой команды 8бит. После выполнения соответствующей команды можно передать функциональную команду датчику.
|
SEARCH ROM |
Когда система первоначально подключена, она должна распознать все подключенные к шине устройства. Для этого эта команда. Но, поскольку у нас всего лишь один датчик, пользоваться этой командой мы не будем. |
|
READ ROM |
Эта команда используется только тогда, когда на шине имеется лишь один датчик. Это позволяет ведущему устройству считать содержимое 64 бит ROM-памяти не используя команду ее поиска. А если же вы попробуете использовать эту команду при подключенном количестве датчиков, более 1, все они начнут передавать содержимое этой памяти, что приведет к нежелательным последствиям. |
|
MATCH ROM |
Это команда соответствия ROM. Мастер выпускает 64 бита соответствующей памяти ROM подключенного к шине датчика, и там уже определяется, что с ним делать (измерить температуру, и т.д.). Другие датчики на шине будут в это время ждать своей очереди. |
|
SKIP ROM |
Это команда пропуска ROM. Не принимает в расчет адрес какого-либо конкретного датчика на шине, а обращается сразу ко всем. После этой команды, можно выдать, например, команду преобразования температуры, и все датчики начнут преобразование. Однако вывести команду чтения памяти после вызова этой команды приведет к непредсказуемым результатам (потому что сразу все датчики будут передавать данные). Значит, только при одном подключенном датчике возможна такая ситуация. |
|
ALARM SEARCH |
Эта команда идентична первой в этой таблице за исключением того, что осуществляет поиск датчиков на шине с установленным флагом тревоги. |
Функциональные команды.
Эти команды осуществляют функциональные операции каких либо процессов, например, запуск операции преобразования температуры, копирование памяти и т.д. Всего команд 6, разрядность каждой 8бит.
|
CONVERT T |
Запуск преобразования температуры. После выполнения этой команды 2-байтные данные заносятся в регистр температуры. |
|
WRITE SCRATCHPAD |
Записывает данные в регистры 2-4 начиная со второго, младшим битом вперед. Во время передачи данные в три регистра необходимо следить, чтобы мастер не сбросил датчики, потому что возможна потеря данных. |
|
READ SCRATCHPAD |
Инициирует процесс передачи данных всех регистров памяти scratchpad, начиная с младшего бита байта 0 и заканчивая старшим битом байта 8 (CRC). |
|
COPY SCRATCHPAD |
Эта команда копирует содержимое регистров байта 2, 3 и 4 в соответствующие EEPROM-ячейки. |
|
RECALL E 2 |
Эта команда копирует данные из EEPROM в соответствующие места в блокнотной памяти scratchpad. Как отмечалось ранее, при включении питания эта операция происходит автоматически. |
|
READ POWER SUPPLY |
Вот, собственно, и вся премудрость работы с датчиком температуры DS18B20. За более детальной информацией обращаемся в даташит (). Теперь необходимо все это дело реализовать в железе.
Принципиальная схема устройства:

Сборочный чертеж печатной платы (извиняюсь за качество, делал лишь бы работало, для отладки):

Не забудьте правильно отзеркалить плату
Поскольку это макетка, я вытащил ее из старого проекта, поэтому на плате, приведенной выше – немного не то, что у меня (на своей я сейчас убрал все лишнее и оно стало точь-в-точь как на рисунках выше).
Вот что вышло у меня:



Получился этакий бутерброд
Исходный код программы был написан в среде разработки . Я не старался использовать максимум готовых библиотек avr-gcc компилятора, а писал все, как говорится, «от руки». Моя цель – это не демонстрация виртуозного владения Си, а всего лишь пример, написанный за час, способный предоставить новичкам общее представление по работе с датчиком.
Устройство предназначено для использования в комнате, поэтому не предусматривает измерение отрицательных температур.
Скачать исходники и печатную плату LAY вы можете ниже
Все дополнительные вопросы, пожелания жду по адресу: [email protected]
Пора переходить к чему-нибудь более полезному в хозяйстве. Ну, например, сделать цифровой термометр, что-ли. Тем более, что с Ардуино - это совсем не так сложно, как было в "доконтроллерную эпоху". В те времена электронный термометр представлял собой сложную конструкцию из десятка микросхем, аналогового датчика, который нужно было еще откалибровать, и трансформаторного блока питания на несколько выходных напряжений. Ну, и - соответствующей подготовки радиолюбителя, который задумает все это собрать. Сейчас с этим - все гораздо проще.
Разрешите представить - цифровой датчик температуры буржуинской фирмы "Dallas semiconductor" DS18B20.
Полностью функциональное устройство для точного (до нескольких знаков после запятой) измерения температуры в диапазоне от -55 до +120 градусов Цельсия. Кроме того - имеется даже немного "мозгов" (ячеек памяти) для запоминания чего-нибудь полезного. Но пока что мы ими пользоваться не будем. Как видно на рисунке - выпускается в нескольких вариациях. Самая распространенная и для нас удобная - та, где написано "ТО-92".
Датчик имеет всего 3 вывода, на два из которых подается напряжение питания 5в, а средний вывод - для передачи данных. Все управление датчиком (подача на него команд, считывание измеренной температуры) идет по единственному проводнику, поэтому вся эта технология и протокол приема-передачи называется "1-Wire" или "One-Wire".
Чтобы не сильно загружаться теорией, примерно рассмотрим вкратце процесс измерения температуры с помощью нашего датчика.
Каждый сеанс передачи или приема данных начинается с команды инициализации. Опять же не будем вдаваться в подробности общения Ардуины с термометром, за нас это сделали посторонние люди (мысленно скажем им спасибо). Просто передадим ей одну команду - "инициализация", и она сама разберется, что надо сделать.
Далее, после инициализации, начинаем подавать управляющие команды. Тут надо заметить, что на одном управляющем проводке, теоретически, может находиться несколько устройств семейства "1-Wire". Причем, не только датчики температуры. Поэтому, есть возможность обращаться к каждому из них по уникальному серийному номеру. Но, поскольку у нас на проводе единственный датчик, то ни к чему другому мы не можем обратиться в принципе. Поэтому эти прелюдии пропускаются командой (передаваемым байтом "0хСС"). Забыл сказать - здесь и далее используется шеснадцатиричная запись двоичных чисел (байтов).
После того, как определились с адресатом - передаем команду "измерить температуру" ("0х44"). После этого нужно оставить датчик в покое примерно на 1 секунду, пока он будет делать свои дела.
За это время "ds-ка" измерит температуру и запишет результаты в два байта, которые нам нужно у нее выудить и привести к человеческому виду. Начинаем, как всегда, с инициализации сеанса связи. Потом снова передаем команду "сброс передачи адреса" ("0хСС"). И тут же следом - сообщаем, что готовы принять результат измерения: ("0хВЕ").
После этого Ардуина получает последовательно 2 байта (или двухбайтное число - кому как нравится) с результатами. Посмотрим, что это за результаты и как нам привести их к удобоваримому виду.
Опять же, чтоб не сильно грузиться, определимся с тем, что для нас важно. А именно - в младшем и, частично, в старшем байте находится результат измерения температуры с точностью до 4-го знака после запятой (нам такая точность - излишня). Знак температуры ("+" или "-") определяется значением старшего бита старшего байта.
Но, довольно слов - пора заняться конструированием. Схема подключения DS18B20 к Ардуине не только проста - а элементарно проста:

Выводы питания датчика подключены к соответствующим выводам Ардуины, а вывод данных - к цифровому выходу "10". Кроме того, вывод данных подключен к шине +5 вольт через резистор 3 - 5 килоом (так называемый "подтягивающий" резистор). Заметьте, что цифровой выход "10", хотя он будет работать и на выход, и на вход, нам уже не придется настраивать, как в предыдущем примере со светодиодами. Разработчики библиотеки "1-Wire" заботливо освободили нас от всякой черновой работы. Спасибо им за это!
В-общем, у меня получилось, примерно, так:

Да! Совсем забыл! Библиотека "1-Wire" не входит в базовую поставку Arduino IDE, поэтому ее нужно скачать, например, отсюда . Распакуем архив и положим папку с библиотекой в директорию \libraries, которая находится в папке, где установлена Arduino IDE. При следующем запуске среды разработки - библиотека будет доступна для использования. Вот где ее можно найти:

Однако, не будем использовать скетч из "Образцов", там сильно всего наворочено. Лучше скопируем в Arduino IDE вот такой скетч:
#include
OneWire ds(10); //
void setup(void) {
Serial.begin(9600); //настраиваем последовательный порт для вывода результатов
}
void loop() {
byte data; // объявляем массив из 2-х байт
ds.reset(); // инициализируем датчик
ds.write(0xCC); // пропускаем адресацию к конкретному датчику (у нас он один)
ds.write(0x44); // даем команду измерять температуру
delay(1000); // ждем 1 секунду, пока измеряется температура
ds.reset(); // снова инициализируем датчик
ds.write(0xCC); // снова пропускаем адресацию
ds.write(0xBE); // даем команду готовности считывать температуру
data = ds.read(); //считываем младший
data = ds.read(); // и старший байты
int Temp = (data << 8) + data; // преобразуем считанную информацию
Temp = Temp >> 4; // к нужному виду.
Serial.println(Temp); // выводим результат в последовательный порт.
Что мы тут видим... Сначала к скетчу подключается библиотека "OneWire". Указываем, что наш датчик подключен к выводу "10" Ардуины. Затем настраивается последовательный порт для вывода результатов измерения. Все, подготовительные операции закончены, начинаем измерять. Подготавливаем (резервируем и называем) 2 байта, куда будем записывать результат измерения температуры. Затем - подаем команды, как описывалось выше и, наконец, получаем 2 байта с нашей температурой. Затем происходит преобразование считанной информации и удаление лишних знаков после запятой с тем, чтобы получить целое значение температуры, без десятичных дробей. Эта информация и выводится через последовательный порт. Где мы можем ее увидеть? А вот здесь:

Итак, загружаем этот скетч в Ардуину, открываем "Монитор последовательного порта" и наблюдаем каждую секунду измеренную температуру:

Ура! Заработало! Не будем вдаваться в подробности процесс преобразования полученных от датчика 2-х байт в целое число температуры, это тема для отдельной большой статьи. Скажу только, что полученное число - переменная Temp типа integer. То есть, она может принимать как положительные значения, так и отрицательные. Проверим работу нашего устройства на морозце:

Ну что же - показывает и отрицательные температуры. Даже прямо сразу со знаком. В дальнейшем, когда мы будем выводить температуру на различные индикаторы, надо будет запомнить эту особенность нашей программы. И предусмотреть дополнительно индикацию знака плюсовой температуры. Но про то - уже в следующих статьях.
В предыдущих уроках мы уже работали с датчиком температуры и влажности DHT11, а также с терморезистором. На этот раз попробуем разобраться ещё с одним популярным датчиком измеряющим температуру — DS18B20.
Это устройство позволяет измерять температуру в диапазоне от –55°C до +125°C с точностью ±0.5°C (при температуре от –10°C до +85°C). Питаться DS18B20 может как от 3.3, так и от 5 Вольт.
Сам по себе датчик — это микросхема, которая может встречаться в разных корпусах:
Также популярными являются готовые модули, на которых размещен датчик, резистор подтяжки и разъем.
 Другой вариант — датчик в герметичной стальной капсуле с проводом:
Другой вариант — датчик в герметичной стальной капсуле с проводом:

1. Подключение модуля DS18B20-ROC к Ардуино
В этом уроке мы будем работать с модулем датчика температуры, разработанным в RobotClass. Подключать мы его будем к контроллеру Ардуино Уно. Как и DHT11, датчик DS18B20 использует однопроводную шину (1-wire) для обмена данными с контроллером. Так что нам потребуется всего три провода чтобы подключить датчик к Ардуино. Принципиальная схема Внешний вид макета
Внешний вид макета
 Примечание.
В случае использования не модуля, а отдельной микросхемы, необходимо вывод микросхемы OUT соединить с контактом питания через резистор 4,7 КОм. В указанном выше модуле этот резистор уже установлен.
Примечание.
В случае использования не модуля, а отдельной микросхемы, необходимо вывод микросхемы OUT соединить с контактом питания через резистор 4,7 КОм. В указанном выше модуле этот резистор уже установлен.
2. Программа для получения данных с датчика DS18B20
Напишем программу, которая будет каждую секунду считывать показания температуры с датчика и выводить их в COM-порт. #includeЗаключение
С помощью датчика температуры можно сделать простейшую систему автоматической вентиляции в квартире или в теплице. Достаточно добавить в программу оператор условия, который будет проверять достижение температурой определенного значения и включать вентилятор с помощью реле. Подобным же образом мы работалиТак исторически сложилось, что на текущий момент одним из самых популярных цифровых температурных датчиков является датчик DS18B20 корпорации Dallas Semiconductor. Конечно же и мы не можем обойти его стороной.
Вся память DS18B20 включает в себя оперативную (SRAM) и энергонезависимую (EEPROM) память. В EEPROM хранятся регистры TH, TL и регистр конфигурации. Если функция тревожного сигнала не используется, то регистры TH и TL могут использоваться как регистры общего назначения. В режиме термостата TH содержит значение верхнего порога температуры, TL соответственно нижнего порога.
Кодинг.
Первым делом нам потребуется библиотека OneWire которая нам очень упростит жизнь. Скачать можно с GitHub или с нашего сайта .
Любое общение с датчиком начинается с команды Reset . То есть МК прижимает шину данных в состояние логический «0» на 480 µs, потом отпускает ее. Датчик отвечает на это сигналом присутствия, после чего мы отправляем команду Skip ROM (0xCC) . Тое сть обратимся ко всем датчика которые присутствуют на шине.
OneWire(uint8_t pin);Конструктор, Pin – номер вывода, к которому подключен датчик.
uint8_t reset(void);Инициализация операции на шине. С этой команды должна начинаться любая операция обмена данными. Возвращает:
- 1 – если устройство подключено к шине (был ответный импульс присутствия);
- 0 – если устройство отсутствует на шине (ответного импульса не было).
Запись байта. Передает байт в устройство на шине.
Отправим команду 0x44 инициализации измерения температуры.
Пауза 1 сек . Ожидание на время, необходимое для выполнения датчиком преобразования температуры. Это время зависит от выбранной разрешающей способности датчика. Разрешение 12 бит установлено в датчике по умолчанию. Время преобразования для него – 750 мс.
Затем мы отправляем команду Reset , Skip ROM (0xCC) , а замет команду 0xBE чтения памяти датчика.
Вот и сам код из библиотеке:
#include
Собственно это библиотека подходить для всех датчиков семейства DS18 (DS18B20, DS18S20, DS1820, DS1822) подключение не чем не отключаются. Ну а некоторые различия можно уже узнать из datesheet к ним.
DS18B20 подключение к Arduino — это фантастический датчик определения температурной составляющей с цифровым интерфейсом в своем составе — следовательно он не требует выполнения калибровки. Поэтому, такие устройства можно подключить одновременно в множественном количестве к одному контакту arduino. Такую возможность предоставляет оригинальный адрес, который был запрограммирован в схему DS18B20 при его изготовлении.
Вот так выглядит эта «супер-сложная» схема DS18B20 подключение к Arduino:
Здесь нужен всего один резистор и больше ничего))). К тому же здесь отсутствуют необходимость в калибровании температуры, а также исключаются возможные неточности при выполнении сборки. Питающее напряжение возможно подавать в диапазоне от 3v до 5v. Все элементарно. А отображение температурного значения - три строки)). Ниже показан образец, все досконально и четко расписано.
Вот отсюда нужно скачать библиотеку:
Тут все аналогично, код в образце Multiple.pde. Разница лишь в том, что применено некоторое количество переменных величин имеющих адреса термометров — следовательно на три датчика три переменные величины со своим адресом и аналогичный код для поиска:
If (!sensors.getAddress(Thermometer1, 0)) Serial.println("Не найден адрес датчика 0"); if (!sensors.getAddress(Thermometer2, 1)) Serial.println("Не найден адрес датчика 1"); if (!sensors.getAddress(Thermometer3, 2)) Serial.println("Не найден адрес датчика 2");
Естественно и вывода температурных составляющих также по три.



